雷賽伺服驅動器由電流控制環,速度控制環和位置控制環三個環路組成,控制框圖如下:
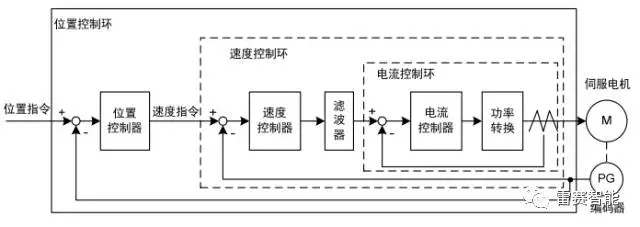
內層的帶寬一定大于外層的帶寬,否則整個控制系統為不穩定系統,會造成系統震蕩。所以,以上三個環路的帶寬關系為:
電流環帶寬>速度環帶寬>位置環帶寬
位置和速度帶寬的選擇是否合適是由機械的剛性和現場應用場合決定的,一般的應用場合,調整慣量比和剛性即可達到現場的響應和定位要求。
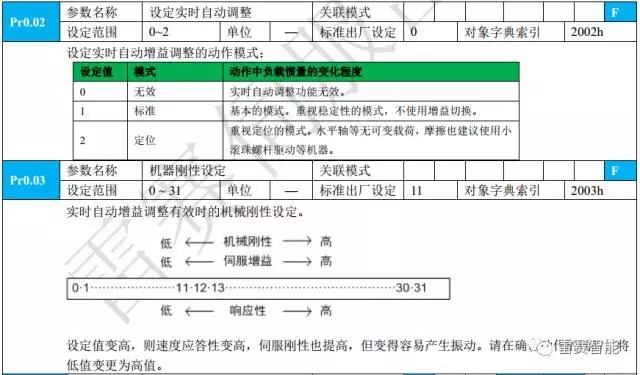
由皮帶、鏈條或帶波動齒輪減速機連接的機械負載剛性較低,可設置為較低帶寬,剛性一般大致為7~10,例如:多關節機器人等;
直接驅動滾珠絲杠的機械負載剛性較高,可設置為較大帶寬,剛性一般大致為14~17,例如:機床、貼片機等進行高精度加工機械;
由減速機帶動的滾珠絲杠的機械負載剛性中等,可設置為中等帶寬,剛性一般大致為11~14,例如:一般工作機、搬運機械等;
如果慣量比和剛性調整后,依然無法達到現場的應用要求,需要對位置環和速度環的參數一一進行微調時,但需要注意的是,如果改變其中一個參數,則其他參數也需要重新調整,請不要對某一個參數做較大額的更改。一般可遵循以下步驟:
提高伺服響應
降低伺服響應

雷賽交流伺服驅動及電機
位置控制的增益調整步驟如下:
1、 設定合適的轉動慣量比;
2、 設定速度環積分時間常數為較大值;
3、 加大速度環增益,如果機械振動,稍許調小;
4、 減小速度環積分時間常數,如果機械振動,稍許調大;
5、 增大位置環增益,如果機械振動,稍許調小;
6、 如果因為機械系統發生共振而無法加大增益,進而無法得到應有的伺服應用要求,可以對轉矩低通濾波器或陷波器調整抑制機械系統共振;然后重新操作以上步驟以提高伺服性。建議首先使用轉矩低通濾波器,若轉矩低通濾波器效果不好再考慮陷波器;
7、 若需要更短的定位時間和更小的位置跟蹤誤差,可適當增加速度前饋,即速度前饋增益,但不宜超過80%;
速度控制的增益調整步驟如下:
1、設定合適的轉動慣量比;
2、設定速度環積分時間常數為較大值;
3、加大速度環增益,如果機械振動,稍許調小;
4、減小速度環積分時間常數,如果機械振動,稍許調大;
5、如果因為機械系統發生共振而無法加大增益,進而無法得到應有的伺服應用要求,可以對轉矩低通濾波器或陷波器調整抑制機械系統共振;然后重新操作以上步驟以提高伺服性。建議首先使用轉矩低通濾波器,若轉矩低通濾波器效果不好再考慮陷波器;
速度環增益:
速度環增益直接決定了速度環的響應帶寬。在機械系統不產生共振或噪音的情況下,增大速度環增益,速度響應會越快,對速度的跟隨性越好。但過大的速度環增益會引起機械共振。
速度環帶寬(Hz) = (1+G)/(1+JL/JM)*速度環增益(Hz)
其中:G為轉動慣量比,JL為折算到電機軸的負載轉動慣量,JM為電機轉子轉動慣量。當設定值G=JL/JM時,速度環增益即為速度環帶寬。
速度環積分時間常數:
速度環積分時間常數可以有效的消除速度穩態誤差,快速反應細微的速度變化。在機械系統不產生共振或噪音的情況下,減小速度環積分時間常數,可以增加系統剛性,降低穩態誤差。如果負載慣量比很大或機械系統存在共振因素,必須加大速度環積分時間常數,減小積分的作用,否則機械系統容易發生共振。如果慣量比參數G設置為JL/JM的情況下,速度環積分時間常數為:
速度環積分時間常數(ms) = 4000/(2*pi*速度環增益(Hz))其中:pi為圓周率。
位置環增益:
位置環增益直接決定了位置環的反應速度。在機械系統不產生共振或噪音的情況下,增加位置環增益,減小位置跟蹤誤差,縮短定位時間。但過大的位置環增益也會造成機械系統抖動或定位超調。位置環帶寬不可高于速度環帶寬,如下:
位置環帶寬(Hz) <= 速度環帶寬(Hz)/4
如果慣量比參數G設置為JL/JM,位置環增益可以計算:
位置環增益(1/s) <= 2*pi*速度環增益(Hz)/4
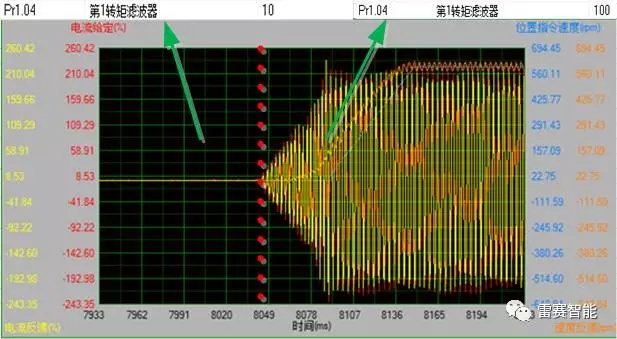
轉矩低通濾波器:
低通濾波器對高頻有很好的衰減,能較好的抑制高頻震蕩和噪聲,但對中低頻共振無抑制作用。例如絲杠連接負載時,增加剛性可以提高系統響應,當提高到一定程度時,有時會發生高頻共振,電流發生震蕩,使用轉矩低通濾波器會有較好的效果。
設置值越小,系統的響應性越能很好的控制,但受機械條件限制;設置值越大,越能抑制高頻共振,但太大設置值會造成響應帶寬和相位裕度減小,造成系統震蕩。
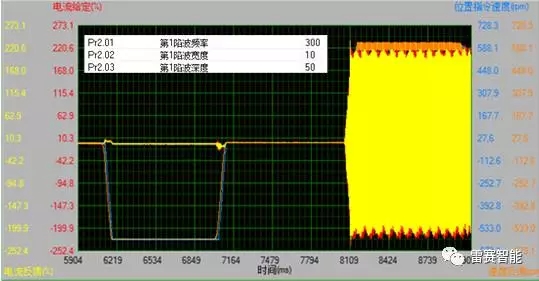
陷波器:
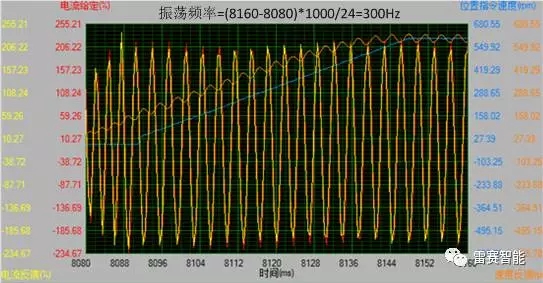
伺服驅動器中有兩個陷波器,可以同時使用,能抑制兩種不同的頻率共振。系統的共振頻率可以大概通過觀看電流波形計算得到,共振頻率知道的情況下,陷波器可以直接將共振現象消除;共振頻率不確定的情況下,可以從高到低逐步降低陷波器頻率設置值,直至電流振蕩最小的頻率設置值即為最優值。
如果共振頻率是隨著時間或其他因素偏移的,且偏移范圍較大,則陷波器不適用。
陷波器不僅包括頻率這個參數,還包括陷波器深度和品質因數。陷波器深度越深,機械共振抑制效果越好,但會造成相位延遲大,有時反而會加大系統的振動;陷波器寬度越寬,品質因數越小,機械共振抑制效果越好,但也會造成相位變化區域大,有時也反而會加大系統的振動。
雷賽伺服常見的調試步驟:
確定接線方式
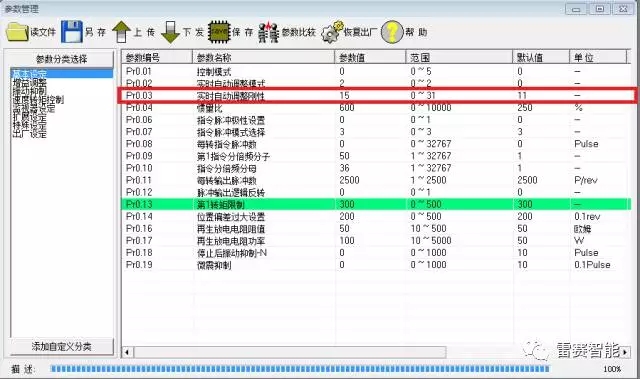
查看使能方式,在外部使能時,參數Pr4.00使用默認參數。當內部使能時參數Pr4.00值更改為383。
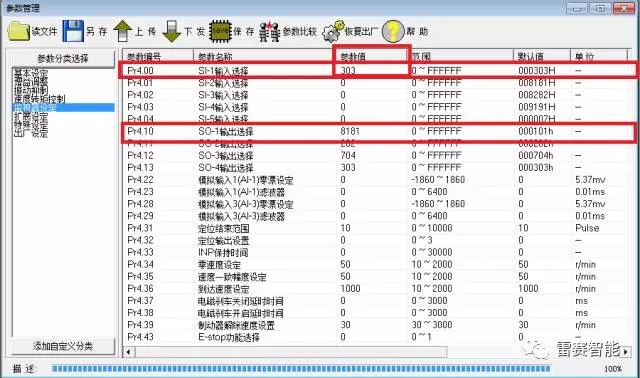
Pr4.10為驅動器報警輸出,當410參數設置為0101時,正常輸出電壓為0V,報警輸出為24V,當多個驅動器報警點并聯時,測得輸出為0V,不能反映報警狀態。
當參數設置為8181時,正常輸出電壓為24V,報警輸出為0V,當多個驅動器報警點并聯時,測得輸出為0V,可以反映報警狀態。
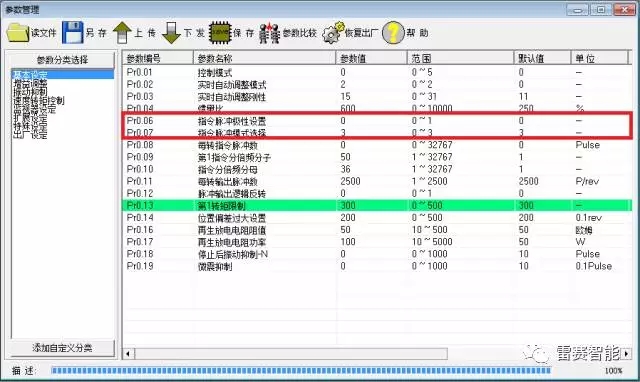
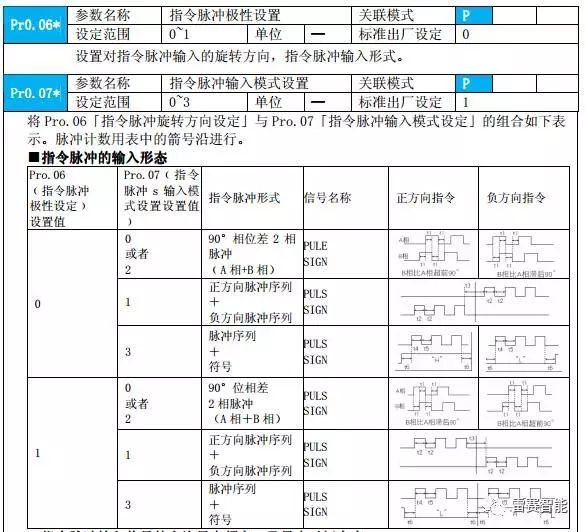
確定脈沖輸入方式,確定參數Pr0.06和Pr0.07
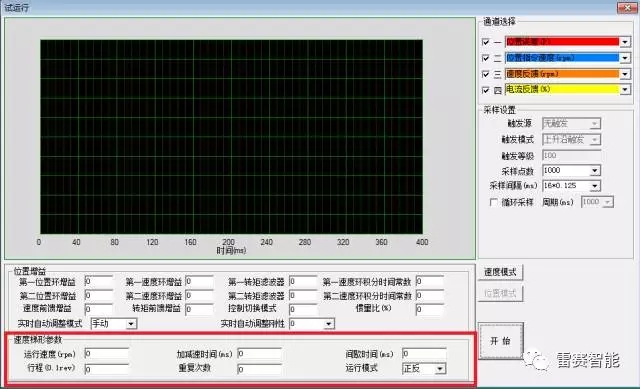
測試負載慣量
驅動器面板監控參數D16可以顯示負載慣量。測試方法:
運行速度≥1000rpm,間歇時間≥1000,重復次數≥1,加減速時間和行程根據應用要求設置。 然后點“開始”,觀察驅動器面板d16 Jrt檢測到的負載慣量值。把監測到的負載慣量平均值減去100填入Pr004。(100是指電機轉子自身負載慣量)

設備剛性
在設備允許的情況下,盡可能增大剛性,當設備出現抖動時,減小剛性。
剛性調整如下:
A:當參數Pr0.02為1或2時,直接調整剛性Pr0.03,剛性關聯的參數如下表參數:
第1增益和第2增益的切換按照參數Pr1.15設置:

B:當參數Pr0.02為0時,剛性Pr0.03與上表中關聯第1增益和第2增益參數解綁,可以按上述步驟拆分對位置環增益、速度環增益、速度環積分時間常數、轉矩濾波器分別調整。
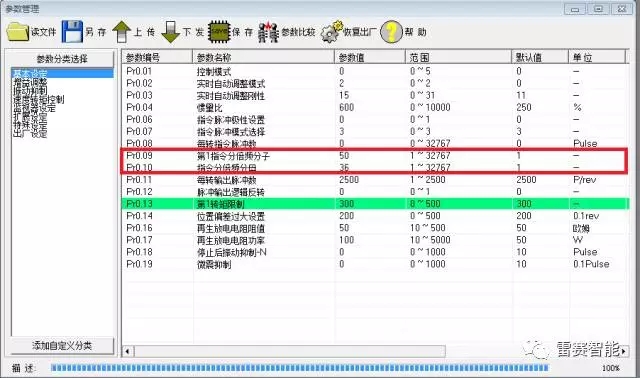
電子齒輪比
電子齒輪的關聯參數為 Pr0.09 和 Pr0.10
驅動器默認脈沖數為10000,當實際脈沖數為10000時,兩個參數都為1
當實際脈沖為1000時,Pr0.09 為10, Pr0.10為1,即默認脈沖數與實際脈沖數的比值。
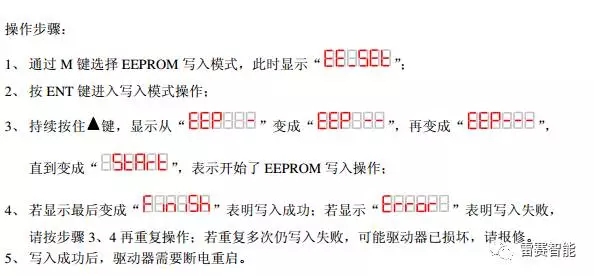
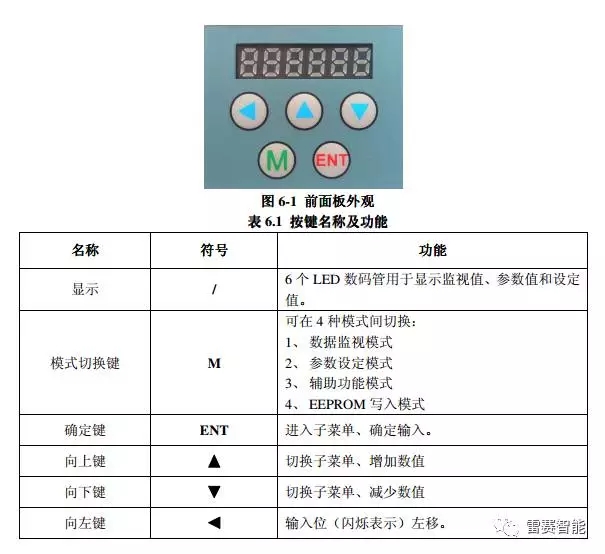
面板操作方法
參數保存操作步驟: