干貨 | 淺析伺服系統(tǒng)應(yīng)用中的編碼器調(diào)試問題
作者:雷賽智能 發(fā)布時(shí)間:2017-09-14
雷賽交流伺服歷經(jīng)15年的不斷進(jìn)步��,產(chǎn)品性能和穩(wěn)定性國(guó)內(nèi)持續(xù)領(lǐng)先�����,成為市場(chǎng)上廣受好評(píng)的伺服品牌����。隨著伺服應(yīng)用的擴(kuò)大,在不同應(yīng)用場(chǎng)合中,客戶希望伺服驅(qū)動(dòng)器能與不同的伺服電機(jī)匹配����。而雷賽LD5系列伺服驅(qū)動(dòng)器通用性就非常強(qiáng)大����,不僅可支持雷賽品牌伺服電機(jī)�,同時(shí)支持直流無刷、空心杯、其他品牌交流伺服電機(jī)等多種電機(jī)形式。這些電機(jī)中若具備電子銘牌功能����,在應(yīng)用中就可以直接使用��,不需要需要調(diào)整編碼器;如雷賽交流伺服電機(jī)具有電子銘牌功能�,能自動(dòng)識(shí)別電機(jī)型號(hào)�����,參數(shù)并對(duì)應(yīng)匹配參數(shù)就能發(fā)揮伺服優(yōu)異性能。若不具備電子銘牌功能的電機(jī),則需要調(diào)整編碼器和電角度。那么����,這類伺服電機(jī)如何選擇及調(diào)整編碼器以適配高低壓交流伺服驅(qū)動(dòng)呢��?
下面我們以雷賽LD5系列伺服為例,通過編碼器原理、霍爾應(yīng)用原理、調(diào)整步驟三個(gè)方面進(jìn)行解讀:
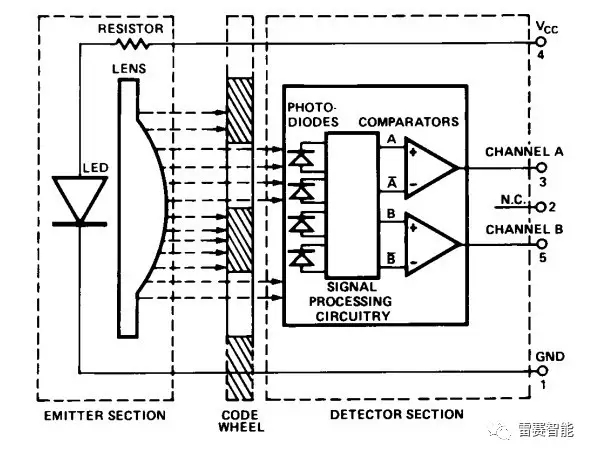
編碼器的種類有很多種��,輸出的信號(hào)形式也有很多種,目前主要使用的為光電編碼器,輸出信號(hào)形式為脈沖方式����,其原理如下圖1-1
光電碼盤安裝在電機(jī)軸上,其上有環(huán)形通��、暗的刻線�����。通過LED發(fā)射光源���,多組光耦器件矩陣排列提升信號(hào)穩(wěn)定性��,并通過接受光源的強(qiáng)弱����,內(nèi)部進(jìn)行比較輸出A����、B兩路信號(hào)。A、B信號(hào)相差90度相位差�����。另外每轉(zhuǎn)輸出一個(gè)Z相脈沖以代表零位參考位���。
由于A�����、B兩相相差90度����,可通過比較A相在前還是B相在前�,以判別編碼器的正轉(zhuǎn)與反轉(zhuǎn)�����。
為增加編碼器信號(hào)長(zhǎng)線傳輸?shù)姆€(wěn)定性�,A�、B、Z信號(hào)輸出時(shí)經(jīng)差分輸出以增加信號(hào)穩(wěn)定性�����。
光電編碼器的霍爾信號(hào)U�����、V����、W其產(chǎn)生原理與A��、B信號(hào)基本一致�����。無刷或低壓伺服也有通過磁環(huán)及霍爾元件來產(chǎn)生霍爾信號(hào)。
二�����、伺服電機(jī)中霍爾應(yīng)用原理
眾所周知伺服電機(jī)相比其他電機(jī)具有很高的效率����,其主要原因是伺服電機(jī)采用了矢量控制的原理�����。簡(jiǎn)單來說���,伺服電機(jī)主要由旋轉(zhuǎn)的永磁體(轉(zhuǎn)子)和三組均勻分布的線圈(定子)組成���,線圈包圍著定子被固定在外部��。電流流經(jīng)線圈產(chǎn)生磁場(chǎng)�����,三組磁場(chǎng)相互疊加形成一個(gè)矢量磁場(chǎng)��。通過分別控制三組線圈上的電流大小,我們可以使定子產(chǎn)生任意方向和大小的磁場(chǎng)�����。
同時(shí)���,通過定子和轉(zhuǎn)子磁場(chǎng)之間的相互吸引和排斥����,力矩便可自由地得到控制。對(duì)于轉(zhuǎn)子旋轉(zhuǎn)的任意角度���,定子都存在著一個(gè)最優(yōu)化的磁場(chǎng)方向,能產(chǎn)生最大的力矩����。很顯然如果定子產(chǎn)生的磁場(chǎng)方向正交于轉(zhuǎn)子的磁場(chǎng)方向,這個(gè)位置就是產(chǎn)生最大力矩的位置。
固定線圈的空間電流矢量具有一個(gè)固定的磁場(chǎng)方向�����,這完全由通過線圈的磁通大小和流經(jīng)線圈的電流相互作用決定的����。這樣我們就可以用空間電流矢量來表征定子的磁場(chǎng),這個(gè)空間電流矢量也就是三組線圈所產(chǎn)生的電流矢量的空間疊加����。這個(gè)就是伺服矢量控制的基本原理�。
1�����、 交流伺服電機(jī)的霍爾信號(hào)應(yīng)用原理
交流伺服驅(qū)動(dòng)起得到運(yùn)轉(zhuǎn)指令后��,先根據(jù)電機(jī)霍爾U、V、W反饋的信號(hào)判斷轉(zhuǎn)子初步位置��, 給出初始電流使定子形成一個(gè)與在該區(qū)間轉(zhuǎn)子磁場(chǎng)垂直的磁場(chǎng)以驅(qū)動(dòng)轉(zhuǎn)子運(yùn)轉(zhuǎn)��,當(dāng)轉(zhuǎn)子帶動(dòng)編碼器運(yùn)轉(zhuǎn)使之輸出第一個(gè)霍爾上升下降沿(U���、V���、W中任一個(gè)發(fā)生高低電平變化)時(shí)�����,驅(qū)動(dòng)器立即根據(jù)該轉(zhuǎn)子位置變換電流使定子形成與轉(zhuǎn)子磁場(chǎng)垂直的磁場(chǎng),此后便根據(jù)A����、B信號(hào)判斷轉(zhuǎn)子的位置輸出電流,確保定子的磁場(chǎng)始終與轉(zhuǎn)子磁場(chǎng)垂直��。為減少A�����、B信號(hào)的累計(jì)誤差����,每次遇到Z信號(hào)時(shí)便對(duì)A��、B信號(hào)進(jìn)行校正���,以減少誤差累計(jì)����。
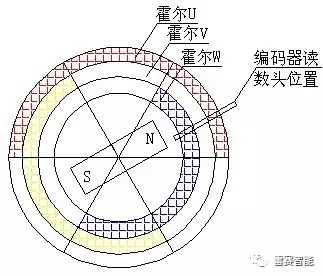
2��、 運(yùn)行演示(為方便理解����,用一對(duì)極電機(jī)作圖)
如圖1-2,編碼器讀數(shù)頭獲得的霍爾U���、V、W信號(hào)將轉(zhuǎn)子位置劃分為6個(gè)區(qū)域��,霍爾信號(hào)如下表
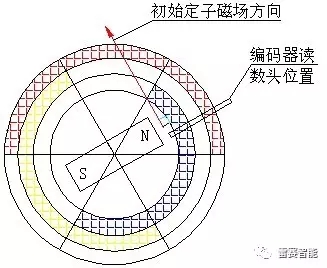
如圖1-3所示�����,轉(zhuǎn)子位于0-60°位置�,則定子給出一與30°位置垂直的磁場(chǎng)使之旋轉(zhuǎn)����,如下圖:
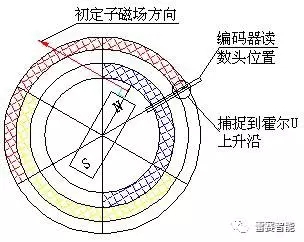
此磁場(chǎng)方向初始一直保持不變�,直至遇到第一個(gè)霍爾上升下降沿,便進(jìn)行改變�,如圖1-4:
從此以后便根據(jù)A�����、B信號(hào)判斷轉(zhuǎn)子位置,使定子磁場(chǎng)一直保持與轉(zhuǎn)子磁場(chǎng)垂直��。
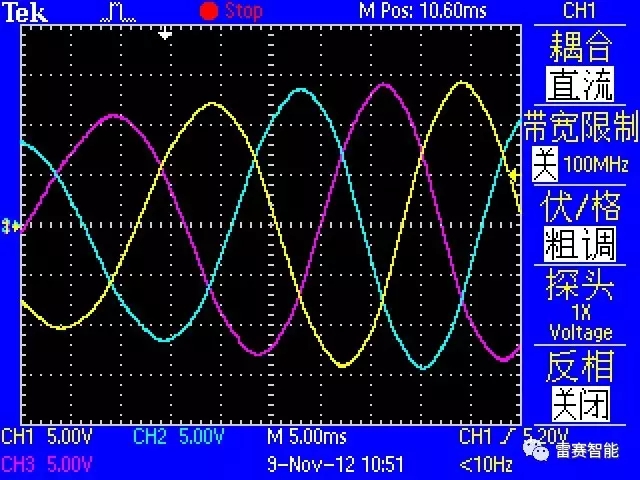
電機(jī)繞組U、V�����、W反電動(dòng)勢(shì)需滿足U超前V超前W�����。用示波器測(cè)量電機(jī)三相繞組的反電動(dòng)勢(shì)波形����,得到如下波形圖1-5:
則可定義黃色波形所對(duì)應(yīng)繞組為U����,藍(lán)色波形所對(duì)應(yīng)繞組為V����,紅色波形所對(duì)應(yīng)繞組為W。
2、檢測(cè)編碼器定義旋轉(zhuǎn)正方向是否與電機(jī)旋轉(zhuǎn)正方向一致�。
這一項(xiàng)很多朋友都很容易忽略�,總是直接按編碼器的定義直接安裝驅(qū)動(dòng)器的信號(hào)要求來直接接線�,經(jīng)常導(dǎo)致有的信號(hào)編碼器可以,換一種編碼器又不行。產(chǎn)生這個(gè)問題的原因主要是驅(qū)動(dòng)器與編碼器不是同一家廠家生產(chǎn)的,所以其定義的旋轉(zhuǎn)正方向不一致�����,就目前我所調(diào)試的編碼器來看��,安華高���、多摩川定義的旋轉(zhuǎn)方向與雷賽伺服定義一致��,而內(nèi)密控、丹納赫定義的旋轉(zhuǎn)方向相反。
所以對(duì)一個(gè)新的編碼器���,一、通過資料判斷其定義的旋轉(zhuǎn)方向,二、通過測(cè)試來確定其旋轉(zhuǎn)方向,其方法如下:
1、按雷賽定義的旋轉(zhuǎn)方向(逆時(shí)針)運(yùn)轉(zhuǎn)電機(jī)帶動(dòng)編碼器運(yùn)轉(zhuǎn),測(cè)試其定義的A����、B信號(hào)波形�����,如圖
1-6:
如測(cè)試發(fā)現(xiàn)為B信號(hào)超前A信號(hào)90°�,則需將A信號(hào)定義為B信號(hào)����,B信號(hào)定義為A信號(hào)。如果不將A��、B信號(hào)重新定義���,則編碼器反饋的行程與所運(yùn)轉(zhuǎn)的行程相反��,導(dǎo)致伺服電機(jī)“飛車”的產(chǎn)生。
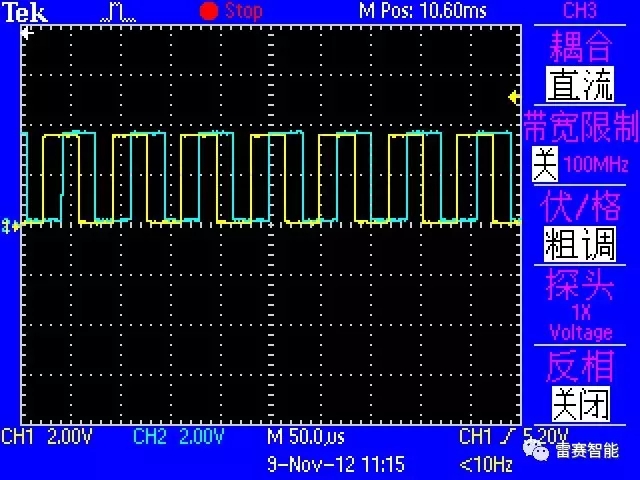
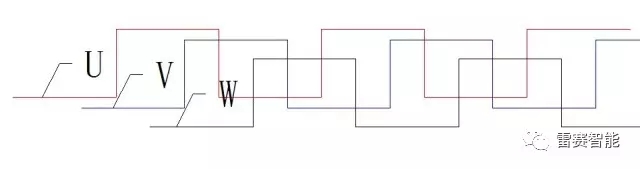
2、按雷賽定義的旋轉(zhuǎn)方向(逆時(shí)針)運(yùn)轉(zhuǎn)電機(jī)帶動(dòng)編碼器運(yùn)轉(zhuǎn)�����,測(cè)試其定義的霍爾U����、V、W信號(hào)波形,
現(xiàn)霍爾U���、V、W信號(hào)為霍爾U超前霍爾V超前霍爾W,則為符合雷賽伺服定義標(biāo)準(zhǔn)���。如發(fā)現(xiàn)霍爾U超前霍爾W超前霍爾V,則需將霍爾W定義為霍爾V����,霍爾V定義為W�,如不進(jìn)行重新定義�,則根據(jù)上文中闡述的霍爾信號(hào)應(yīng)用原理,則會(huì)發(fā)生驅(qū)動(dòng)器對(duì)轉(zhuǎn)子位置出現(xiàn)判斷錯(cuò)誤的情況����。
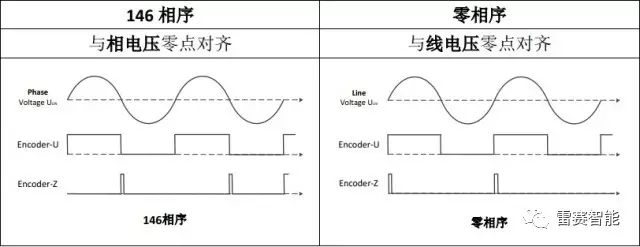
3����、霍爾信號(hào)與反電動(dòng)勢(shì)相位關(guān)系
如圖1-7與1-8對(duì)相位關(guān)系
零相序?yàn)椋夯魻朥對(duì)UV線間反電動(dòng)勢(shì)(探頭正接U���、負(fù)接V), 霍爾V對(duì)VW線間反電動(dòng)勢(shì)(探頭正接V��、負(fù)接W)�,霍爾W對(duì)WU線間反電動(dòng)勢(shì)(探頭正接W��、負(fù)接U),相位關(guān)系為霍爾信號(hào)的上升沿過零點(diǎn)對(duì)反電動(dòng)勢(shì)上升沿的過零點(diǎn)。
146相序?yàn)椋夯魻朥對(duì)U相反電動(dòng)勢(shì)(探頭正接U�、負(fù)接零線), 霍爾V對(duì)V相反電動(dòng)勢(shì)(探頭正接V���、負(fù)接零線)���,霍爾W對(duì)W相反電動(dòng)勢(shì)(探頭正接W��、負(fù)接零線),相位關(guān)系為霍爾信號(hào)的上升沿過零點(diǎn)對(duì)反電動(dòng)勢(shì)上升沿的過零點(diǎn)。
通過以上的調(diào)整�����,大家就可以利用雷賽高可靠性的伺服驅(qū)動(dòng)器匹配各類型伺服電機(jī)以滿足各類應(yīng)用要求了���。









-02.png)