摘要:本文分析了永磁交流伺服電動機在行業(yè)應(yīng)用中,對轉(zhuǎn)矩常數(shù)、反電勢常數(shù)產(chǎn)生很多誤解、混淆的原因,并給出了有效解決問題的辦法。同時,在應(yīng)用過程中如何利用好這兩個常數(shù),也給出了探討。為便于工程師理解應(yīng)用,對GB/T 30549-2014中Kt=√(3)Ke的結(jié)論還給出了詳細的演算過程。另外,特別指出永磁交流伺服電動機機械轉(zhuǎn)矩與電磁轉(zhuǎn)矩的區(qū)別。
關(guān)鍵詞:轉(zhuǎn)矩常數(shù),反電勢常數(shù),交流伺服,伺服電機,永磁交流伺服電動機,永磁同步電機
中圖分類號:TM383.4 文獻標志碼:A 文章編號:
Normalizing Application of Torque Constant & Back EMF Constant of Permanent Magnet AC Servo Motor
Huang Jie Jian
(Shenzhen Leadshine Company Ltd. Shenzhen 518052)
Abstract: The cause of misunderstanding and confusion on Torque constant and Back EMF constant during using the PMSM is analyzed. And the way to effectively solve the problem is presented. The way to well utilize the two constants is also discussed. For convenience understanding and application of the relationship between the two constants, the article also derives in detail the conclusion Kt=√(3)Ke from GB/T 30549-2014. The difference between mechanical torque and electromagnetic torque is also given.
Key words: Torque constant, Back EMF constant, AC servo, Servo Motor,Permanent Magnet AC Servo Motor, PMSM
0 引言
選好用好永磁交流伺服電動機的轉(zhuǎn)矩常數(shù)和反電勢常數(shù)(以下稱兩常數(shù))對于裝備制造業(yè)用戶非常重要。
每一臺永磁無刷電動機都具有雙重身份,把驅(qū)動電流為方波的稱為永磁無刷直流電動機(以下稱BLDCM),但驅(qū)動電流為正弦波的則有幾種叫法,在英美的文獻中,把這類正弦波驅(qū)動的稱為 “永磁 同步電動機 (PMSM )”或者“無刷交流電動機 (BLACM )”,在日本和歐洲則大多數(shù)情況下稱為“交流伺服電動機 (AC servo)”,國內(nèi)基本上也多數(shù)采用 AC servo的名稱。本文采用2014年版GB/T 30549《永磁交流伺服電動機通用技術(shù)條件》(以下稱GB/T 30549-2014)的叫法—Permanent Magnet AC Servo Motor(以下簡稱 AC Servo)。在采用國際單位制時,BLDCM的兩常數(shù)是相等的(成立條件:續(xù)流回路的電流相對很小可以忽略時[2]),而在AC Servo中有的倍數(shù)關(guān)系,但目前有的工程師還未重視這一區(qū)別,另外,不少AC Servo公司的產(chǎn)品手冊上經(jīng)常出現(xiàn)兩常數(shù)相互矛盾的情況,導(dǎo)致行業(yè)應(yīng)用的不少麻煩。2007年文獻【1】的發(fā)表,為用戶理解和應(yīng)用好兩常數(shù)起了一定警示作用,GB/T 30549-2014對兩常數(shù)的定義清晰規(guī)范,起到了積極的引導(dǎo)作用,但觀察近兩年國內(nèi)的AC Servo資料,兩常數(shù)存在問題、矛盾的還是不少,用戶碰到這種情況則很困惑、迷茫。在中國制造2025的大背景下,裝備制造業(yè)(如工業(yè)機器人、加工中心、自動化生產(chǎn)線等)的AC Servo應(yīng)用越來越廣泛,因此很有必要為AC Servo正確選型和應(yīng)用進一步普及這方面的知識。
1 轉(zhuǎn)矩常數(shù)與反電勢常數(shù)之間的關(guān)系
按照GB/T 30549-2014條款3.9的定義,是指在規(guī)定條件下,電機通入單位線電流時所產(chǎn)生的平均電磁轉(zhuǎn)矩。也即電機的電磁轉(zhuǎn)矩與電機繞組電流成正比。
Kt = Te / I (N.m/A) (1)
由1.3.1~1.3.4的詳細推導(dǎo)演算可以知道GB/T 30549-2014標準3.9條款定義的“線電流”指的是“線電流有效值”。
從應(yīng)用角度來說,客戶在為其智能裝備進行AC Servo規(guī)格選型時,所需轉(zhuǎn)矩是最關(guān)鍵指標之一,同時還要考慮留有一定余量,待AC Servo裝配到相應(yīng)智能裝備之后,再做一次監(jiān)測計算,確認該AC Servo的轉(zhuǎn)矩特性是否真實,與裝備的匹配關(guān)系是否合理,這樣才能確保智能裝備大批量生產(chǎn)時的批量合格率,并確保在極端允許工況下設(shè)備能可靠運行。
由于AC Servo裝配到裝備上之后,其實際運行時所需最大轉(zhuǎn)矩是非常難以直接測試出來的,那么有何方法可以方便地實時監(jiān)測到設(shè)備上某個軸的負載轉(zhuǎn)矩大小呢?目前大多數(shù)智能裝備用戶都用監(jiān)測裝備上AC Servo的繞組電流值,然后乘以轉(zhuǎn)矩常數(shù),就計算出AC Servo的機械轉(zhuǎn)矩,然而,由于以下三個原因的存在,導(dǎo)致了這種方法出現(xiàn)錯誤:
1) AC Servo銘牌上標稱的額定電流值一般都是指有效值,而部分驅(qū)動器廠商會誤認為是峰值;
2) 這樣測算出來的轉(zhuǎn)矩實際為電磁轉(zhuǎn)矩,而非機械轉(zhuǎn)矩,前者大于后者,因它含有空載損耗轉(zhuǎn)矩;
3) 轉(zhuǎn)矩常數(shù)應(yīng)該用電流有效值來計算,這才可以得到正確的數(shù)值,可有些電機廠商不規(guī)范,采用了電流峰值。
電機廠商在測試計算轉(zhuǎn)矩常數(shù)時候,有不少會犯一個錯誤,即工程師錯把機械轉(zhuǎn)矩當作電磁轉(zhuǎn)矩了。筆者接觸到的幾個電機廠商都這樣測試轉(zhuǎn)矩常數(shù):在測功機上,通過伺服驅(qū)動器設(shè)置好AC Servo的轉(zhuǎn)速為額定轉(zhuǎn)速值,然后再用測功機逐步加大負載轉(zhuǎn)矩,當負載達到額定轉(zhuǎn)矩時候,記錄額定轉(zhuǎn)矩和此時對應(yīng)的繞組電流。用測試記錄的轉(zhuǎn)矩值,除以電流值就得出“轉(zhuǎn)矩常數(shù)”。這測試計算方法中,測功機測試到的“額定轉(zhuǎn)矩”其實是機械轉(zhuǎn)矩(TL),但很多電機廠商錯誤地把它當做“電磁轉(zhuǎn)矩”(Te)直接用于轉(zhuǎn)矩常數(shù)的計算,沒有注意到需考慮 “空載損耗轉(zhuǎn)矩”(T0)的影響,通常認為,三者的關(guān)系如下:
Te=TL+T0 (2)
式(2)中,Te為電磁轉(zhuǎn)矩, TL為機械轉(zhuǎn)矩(負載轉(zhuǎn)矩), T0為空載損耗轉(zhuǎn)矩。而T0一般包括兩部分:軸承摩擦損耗和風損。
按照GB/T 30549-2014的3.10規(guī)定,反電勢常數(shù)是指在規(guī)定條件下,電機電樞繞組開路時,單位角速度在電樞繞組中所產(chǎn)生的線感應(yīng)電動勢值。
該標準3.10有規(guī)定“對正弦波驅(qū)動電機反電動勢為有效值”。而PMSM屬于“正弦波驅(qū)動電機”,因此在PMSM中,需特別注意反電勢常數(shù)Ke的測試中,所述反電動勢應(yīng)為“線感應(yīng)電動勢有效值”。
(式中U為反電動勢,單位為V;ωr為轉(zhuǎn)子角速度,單位為rad/s; n為電機轉(zhuǎn)速,單位為r/min; Ke單位為V/rad·s-1)
在工程應(yīng)用中,電動機的轉(zhuǎn)速單位習(xí)慣使用每分鐘多少轉(zhuǎn)(rpm),很少用角速度,因此工程中反電勢常數(shù)的常用單位為V/krpm,數(shù)值轉(zhuǎn)換關(guān)系如下:
假設(shè)以V/krpm 為單位的反電勢常數(shù)為Ken,則有:
Ke = 0.00955 Ken(V/rad·s-1) (4)
在永磁有刷直流電機中,當反電勢常數(shù)和轉(zhuǎn)矩常數(shù)的單位都采用國際單位制時,兩個常數(shù)的數(shù)值是相等的。在永磁無刷直流電機(BLDCM)中,兩個常數(shù)的數(shù)值在一定條件下也是相等的,也即需考慮文獻【2】的約束條件“……BLDCM的轉(zhuǎn)矩系數(shù)定義為電磁轉(zhuǎn)矩與電樞總電流的比值,而電磁轉(zhuǎn)矩又不完全由電樞總電流產(chǎn)生,使得Kt的值變得不確定,只有續(xù)流回路的電流相對很小可以忽略時, Kt的值才是確定的并與Ke相等”。
在AC Servo中,反電勢常數(shù)和轉(zhuǎn)矩常數(shù)也都是由永磁體產(chǎn)生的氣隙磁通大小,以及定子繞組有效串聯(lián)匝數(shù)的乘積決定的(這個乘積稱為磁通鏈),所以它的兩常數(shù)也存在確定的數(shù)值關(guān)系。GB/T 30549-2014十分清晰地總結(jié)出了這樣的數(shù)值關(guān)系:理想情況下,當采用國際單位制(SI)時,對正弦波驅(qū)動的電機,轉(zhuǎn)矩常數(shù)Kt和反電勢常數(shù)Ke有如下關(guān)系,
Kt=√(3)Ke (5)
式⑸的數(shù)值關(guān)系詳見如下1.3.1~1.3.4的推導(dǎo)演算。
1.3.1 計算基礎(chǔ)
查閱電機電磁計算基本公式可知,永磁交流伺服電動機相感應(yīng)電勢Eφ有效值表達式為:
式(6)中,f為頻率,KW為繞組系數(shù),Wφ為每相串聯(lián)匝數(shù),Kφ為波形系數(shù),φδ為每極氣隙磁通量。
設(shè)Iφ為相電流的有效值,它與Eφ之間的夾角(內(nèi)功率因數(shù)角)為ψ,則每相功率PEφ可求:
當電機按矢量控制狀態(tài)運行使cos(ψ) =1時得:
對于PMSM電機,其整機的電磁功率PE可求:
設(shè)電機的轉(zhuǎn)速為n(r/min),則對應(yīng)的角速度ωr可求:
而且,設(shè)電機的極對數(shù)為P,則有:
(6)式、(7)式、(8)式是1.3.2~1.3.4分析的基礎(chǔ)。
1.3.2 反電勢常數(shù)推導(dǎo)
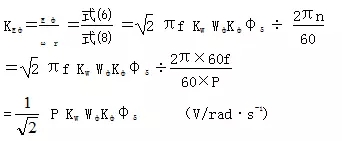
相反電勢常數(shù)KEφ可求:
GB/T30549-2014的標準要求是線反電勢常數(shù),即:
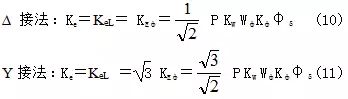
由于繞組在△接中EL=Eφ, 在Y接中EL=√(3)Eφ,于是就會得到如下反電勢常數(shù)的兩種不同表示法:
1.3.3 轉(zhuǎn)矩常數(shù)推導(dǎo)
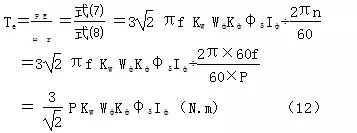
整機的電磁轉(zhuǎn)矩Te可求:
于是相轉(zhuǎn)矩常數(shù)Ktφ 可求:
GB/T30549-2014要求是線電流表示的轉(zhuǎn)矩常數(shù),即:
Kt=KtL=Te\IL。式中,IL為線電流有效值。
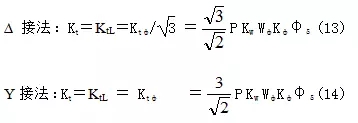
由于繞組在△接中IL=√(3)Iφ, 在Y接中IL=Iφ, 于是就會得到如下轉(zhuǎn)矩常數(shù)的兩種不同表示法:
1.3.4 轉(zhuǎn)矩常數(shù)與反電勢常數(shù)的比值問題:
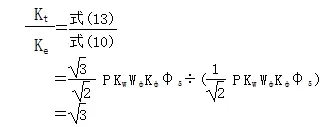
當三相繞組采用△接時:
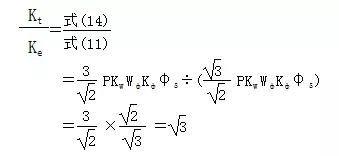
當三相繞組采用Y接時:
至此,GB/T 30549-2014中關(guān)于Kt=√(3)Ke結(jié)論的推導(dǎo)演算完畢。
由于2014年前的標準對兩常數(shù)的定義比較模糊,標準之間甚至存在相互矛盾之處,這就使兩常數(shù)計算時出現(xiàn)這樣的問題:用線值還是用相值?用有效值還是用峰值?于是各取所需出現(xiàn)混亂,似乎都有根據(jù),所以國內(nèi)有的伺服電機廠商提供了定義或單位不統(tǒng)一的兩個常數(shù),客戶應(yīng)用容易出錯。另外,在中國市場上出現(xiàn)的一些國外品牌AC Servo,其反電勢常數(shù)與GB/T 30549-2014的定義不同,基本上是按照相反電勢來定義而并非采用線反電勢來定義。所以我們在建議各電機廠商按照國標要求規(guī)范提供這兩常數(shù)的同時,還在下面提出相關(guān)處理方法,幫助客戶利用GB/T 30549-2014關(guān)于轉(zhuǎn)矩常數(shù)Kt和反電勢常數(shù)Ke的定義,結(jié)合工程應(yīng)用,更方便地讀懂電機廠商提供的電機參數(shù)。
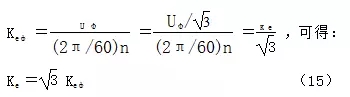
裝備制造業(yè)所用AC Servo中,繞組大多采用Y接(以下同),假設(shè)按照相反電勢來定義的反電勢常數(shù)為Keφ,則有:
引用GB/T 30549-2014的定義結(jié)論后得:
式(15)和式(16)可以非常方便用于判定電機廠商提供的反電勢常數(shù)的正確含義。
工程應(yīng)用中常采用V/krpm為單位的反電勢常數(shù)Ken。由式(4),Ke =0.00955Ken ,得:
2 樣本數(shù)據(jù)的驗證及應(yīng)用
下面用幾個實例來說明如何判定電機廠商提供的兩個常數(shù)的定義方法,對其使用做到心中有數(shù)。
參數(shù)
數(shù)值
單位
額定功率
400
W
額定轉(zhuǎn)速
3000
rpm
最高轉(zhuǎn)速
6000
rpm
額定電流
2.8
A
轉(zhuǎn)矩常數(shù)
0.524
N.m/A
線反電勢常數(shù)
31.7
V/krpm
線電阻
2.7
Ω
線電感
6
mH
按照式⑷,得:
, 得:
,對照式(5)可知,該產(chǎn)品對兩常數(shù)的定義在數(shù)值上與標準的規(guī)定相吻合,是因為反電勢和電流都使用了線有效值。
另外,在工程應(yīng)用中,轉(zhuǎn)速n(r/min)、轉(zhuǎn)矩TN(N.m)、功率P(W)三個參數(shù)關(guān)系如下:
由式(18),得到本電機額定轉(zhuǎn)矩為:
由式(1),得電磁轉(zhuǎn)矩為:
由式(2)得:
參數(shù)
數(shù)值
單位
額定功率
400
W
額定功矩
1.27
N.m
額定轉(zhuǎn)速
3000
rpm
最高轉(zhuǎn)速
5000
rpm
額定電流
2.6
A
轉(zhuǎn)矩常數(shù)
0.49
N.m/A
線反電勢常數(shù)
17.4
V/krpm
線電阻
1.55
Ω
按照式⑷得:
故:
Kt/Ke=0.49/0.1662=2.948≈3,可知采用了式(16)的定義,說明本電機Ke所用反電勢為相電勢有效值。
由式(1),得電磁轉(zhuǎn)矩為:
Te=Kt×IN=0.49×2.6=1.274(N.m)
由式(2)得:
T0=Te - TN =1.274-1.27=0.004(N.m)
計算結(jié)果是額定電流產(chǎn)生的電磁轉(zhuǎn)矩(1.274)與額定轉(zhuǎn)矩(1.27)基本相同,空載轉(zhuǎn)矩約等于0,數(shù)據(jù)必然存在問題,需要電機廠商分析。
參數(shù)
數(shù)值
單位
額定功率
400
W
額定轉(zhuǎn)速
3000
rpm
額定轉(zhuǎn)矩
1.27
N.m
最高轉(zhuǎn)速
6000
rpm
額定電流
2.5
A
轉(zhuǎn)矩常數(shù)
0.544
N.m/A
線反電勢常數(shù)
V/krpm
線電阻
Ω
線電感
mH
上表未能提供反電勢常數(shù)值,我們可以利用式(17)初步計算,得:
Ken= Kt/0.0165=0.544/0.0165=32.97(V/krpm)
初步驗證如下:已知電機最高轉(zhuǎn)速為6 krpm,則在電機最高轉(zhuǎn)速時的反電動勢為:
Emax=Ken×nmax=32.97×6=197.82(V) < 200V ,初步說明197.82V的反電動勢值能與200V輸入電壓相匹配,電機可正常工作。
例題4:國內(nèi)某品牌M公司一臺60機座AC Servo參數(shù)表(220V):
參數(shù)
電機1
電機2
電機3
額定功率(W)
200
400
600
額定線電流(A)
1.5
2.8
3.5
額定轉(zhuǎn)速(rpm)
3000
3000
3000
額定力矩(N.m)
0.637
1.27
1.91
反電勢(V/krpm)
28
28
28
力矩系數(shù)(N.m/A)
0.42
0.5
0.55
表中列舉的是三款同轉(zhuǎn)速不同功率的電機,現(xiàn)來分析一下表中兩個常數(shù)的可靠程度。
首先,由表值,用式(1)算得三種電機的電磁轉(zhuǎn)矩分別為0.63、1.4、1.925(N.m),而它們相對應(yīng)的額定轉(zhuǎn)矩分別為0.637、1.27、1.91(N.m),并未表現(xiàn)出電磁轉(zhuǎn)矩明顯大于額定轉(zhuǎn)矩的規(guī)律,讓人不解;
其次,三種電機轉(zhuǎn)矩常數(shù)依次是0.42、0.5 、0.55 (N.m/A),按照式(17),各種型號AC Servo的Kt/Ken值應(yīng)該是相同的,因此,不同的轉(zhuǎn)矩常數(shù),其對應(yīng)的反電勢常數(shù)也必然不同,但表中的對應(yīng)值全部都是28 V/krpm ,這顯然喪失了樣本數(shù)據(jù)的可信度。
筆者發(fā)現(xiàn)其它一些電機廠商也存在類似問題,這些問題的解決有待電機廠商的工作改進。
伺服驅(qū)動系統(tǒng)的效率測試比較方便,但單獨測試AC Servo的效率,需要能測算出驅(qū)動器的損耗,這比較麻煩。可以用以下方法估算AC Servo的效率。
例題5:請問例題2所述電機的效率是多少?
解:可以用以下方法估算伺服電機的效率。
電機輸出功率:P2=400 W
電磁功率:Pe=3(I×Eφ) = 3(I×Kenφ×n)
=3(2.6×17.4×3)=407.16(W)
式中:Eφ為相反電勢;Kenφ為相反電勢常數(shù)。
繞組銅耗:
電機雜散損耗按1.5%估算:
PZ=P2×1.5%=400×1.5% =6(W)
電機輸入功率:
P1=Pe+PCU+PZ =407.16+31.43+6=444.56(W)
因此電機效率為:
注:上述估算不包括控制器的損耗。
3 結(jié)語
1)由于GB/T30549-2014之前的標準對兩常數(shù)的定義比較模糊,標準之間甚至存在相互矛盾之處,這就使兩常數(shù)計算時出現(xiàn)這樣的問題:用線值還是用相值?用有效值還是用峰值?于是各取所需出現(xiàn)混亂,似乎都有根據(jù),導(dǎo)致了部分電機廠商提供的兩常數(shù)存在問題或矛盾,用戶使用也較困惑,而且容易出錯。
2)通過前述的推導(dǎo)演算可知,GB/T30549-2014所述“轉(zhuǎn)矩常數(shù)……在規(guī)定條件下,電機通入單位線電流時所產(chǎn)生的平均電磁轉(zhuǎn)矩”其中提到的單位電流系有效值電流,轉(zhuǎn)矩常數(shù)與反電勢常數(shù)的比值為常數(shù),通過測量確定出前者就可以計算出后者,反之亦然。所以,貫徹GB/T30549-2014標準后,處理兩常數(shù)問題變得十分簡單,而且不需要考慮電機繞組的具體接法。
考慮到工程應(yīng)用現(xiàn)狀,在反電勢常數(shù)計算中也可以采用V/krpm 為單位的反電勢常數(shù)Ken,客戶利用式(4),就可以方便地得到以國際單位制為單位的Ke(V/rad·s-1)
3)電機廠商在測試計算轉(zhuǎn)矩常數(shù)的時候,要避免錯誤地把測功機上得到的額定轉(zhuǎn)矩當做電磁轉(zhuǎn)矩并用于轉(zhuǎn)矩常數(shù)的計算。額定轉(zhuǎn)矩加上一個空載損耗轉(zhuǎn)矩(T0)才近似得到電磁轉(zhuǎn)矩(Te)。
參考文獻
【1】 段衛(wèi)國,楊飛中,程智,王宗培. 交流伺服電動機的電勢系數(shù)和轉(zhuǎn)矩系數(shù)——樣本數(shù)據(jù)的解讀. 伺服控制 2007(3)
【2】 韓光鮮,謝占明,王宗培,程樹康. 無刷直流電動機轉(zhuǎn)矩系數(shù)的研究. 微電機 2002(3)
【3】 唐任遠. 現(xiàn)代永磁電機理論與設(shè)計[M]. 北京: 機械工業(yè)出版社,1997
【4】 符曦. 高磁場永磁式電動機及其驅(qū)動系統(tǒng)[M]. 北京: 機械工業(yè)出版社,1997
【5】 黃捷建,李浩. 永磁交流伺服電機應(yīng)用中需重點考慮的幾個問題. 伺服控制 2010(10)
作者簡介:黃捷建(1973-),男,高級工程師,從事無刷電機、永磁伺服電機和電機驅(qū)動器的設(shè)計、應(yīng)用推廣工作。Email:janhuang2001@163.com
深圳市雷賽智能控制股份有限公司
地 址:深圳市南山區(qū)學(xué)苑大道1001號南山智園A3棟11樓
電 話:0755-26433338(20線)
傳 真:0755-26402718
郵 編:518052
網(wǎng) 址:www.leisai.com