
|
參數(shù) |
LD2-RS7030B |
|
額定輸出電流(Arms) |
30 |
|
最大輸出電流(Arms) |
64 |
|
主電源 |
24~70VDC |
|
控制方式 |
SVPWM正弦波控制 |
|
輸入脈沖 |
5V脈沖,500kHz |
|
調(diào)速比 |
5000:1 |
|
電子齒輪比 |
1~32767/1~32767 |
|
適配編碼器 |
霍爾信號UVW+編碼器ABZ或485通訊式編碼器(多摩川協(xié)議) |
|
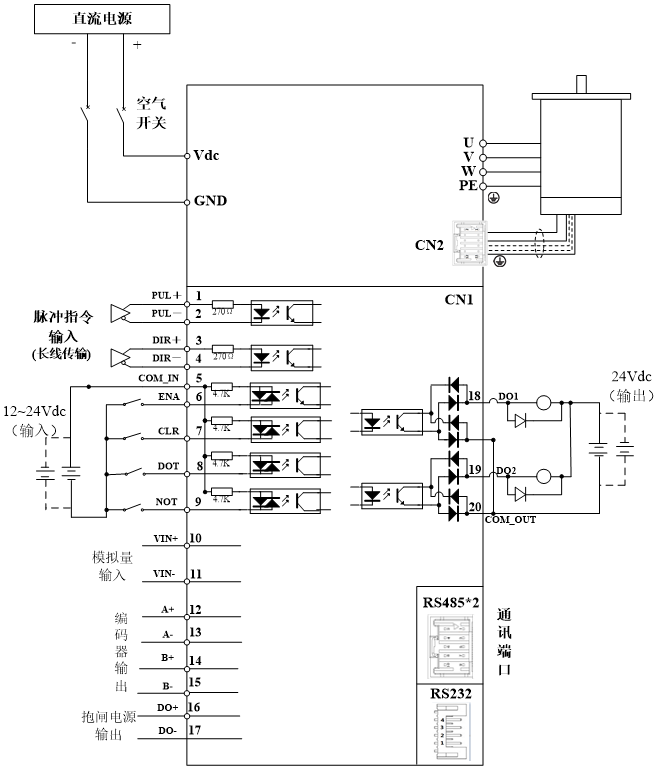
輸入信號 |
6路數(shù)字量輸入: 2路脈沖差分高速輸入口DI1~2,電壓5V(默認(rèn)脈沖+方向); 1路差分輸入,-10VDC~+10VDC; 4路輸入口DI3~DI6,電壓24V,支持NPN和PNP,并且支持輸入功能自定義。功能包括:伺服使能、正向限位、反向限位、警報清除、增益切換輸入、偏差計數(shù)器清除輸入、指令脈沖禁止輸入、指令分頻倍頻切換輸入 、內(nèi)部指令速度選擇、零速箝位、速度指令符號輸入、轉(zhuǎn)矩指令符號輸入、緊急停止。 |
|
輸出信號 |
1路抱閘之間輸出, LD2-RS7030電流0.8A。 2路單端輸出口DO1~DO2,24V,驅(qū)動電流8mA,支持NPN和PNP,并且支持輸出功能自定義。功能包括:報警輸出、伺服準(zhǔn)備輸出、外部制動器解除信號、定位完成、速度到達(dá)輸出、零速箝位檢測輸出、速度一致輸出、位置指令有無輸出、速度指令有無輸出。 |
|
報警功能 |
電流檢測回路錯誤、直流母線電壓過高、直流母線電壓過低、過電流、智能功率模塊(IPM)過流、電機過載、電阻泄放回路過載、編碼器斷線、編碼器初始化位置錯誤、編碼器數(shù)據(jù)出錯、位置誤差過大錯誤、失速、超速、I/F輸入端口分配錯誤、EEPROM參數(shù)保存時CRC校驗錯誤、正/負(fù)超程輸入有效、強制報警輸入有效。 |
|
顯示 |
LED紅、綠燈各一個 |
|
操作方式 |
通過PC軟件(MotionStudio)調(diào)試參數(shù) |
|
調(diào)試軟件 |
通過(MotionStudio)可以調(diào)節(jié)電流環(huán)、位置環(huán)、速度環(huán)的各個參數(shù),更改輸入輸出信號有效電平和電機參數(shù),并可以文件形式進行參數(shù)的導(dǎo)入導(dǎo)出,方便驅(qū)動器和不同電機或不同負(fù)載的匹配;監(jiān)視測試運行下速度、位置誤差等波形。 |
|
通訊接口 |
一路RS-232,1:1通訊;一路RS-485輸入通訊接口,一路RS-485輸出通訊接口,0:N(0≤N≤127),Modbus協(xié)議 |
|
適用負(fù)載慣量 |
小于電機慣量的30倍 |
【注】
1、脈沖和方向接口只支持5V信號,24V脈沖信號建議串接R=2KΩ。
2、4路輸入口DI3~DI6,支持NPN和PNP,推薦外部輸入信號控制電源12~24V。
3、電纜長度盡可能短,控制CN1電纜不超過3米,反饋信號CN2電纜長度不超過10米。差分信號一定要使用雙絞線,且有屏蔽層。
4、2路單端輸出口DO1~DO2,最大驅(qū)動電流100mA,支持NPN和PNP兼容,推薦外部電源24VDC。如果負(fù)載是繼電器等電感性負(fù)載,必須在負(fù)載兩端反并聯(lián)續(xù)流二極管;如果續(xù)流二極管反接,可能會損壞驅(qū)動器。
5、請盡量安排非熔斷型(NFB)斷路器使驅(qū)動器故障時能及時切斷外部電源。
|
驅(qū)動器型號 |
配套電機型號 |
配套電纜 |
||||
|
編碼器線 |
動力線 |
抱閘線 |
通訊線 |
調(diào)試線 |
||
|
LD2-RS7030B
|
LVM06006H2H3-M17 |
CABLE-BMAD*M*-223[多圈] CABLE-BMD*M*-213[單圈可選] |
CABLE-RZD*M*253 |
CABLE-SCD*M*113 |
CABLE-TX*M*LD2 |
CABLE-PC-1 |
|
LVM06006H2G3-M17(抱閘) |
||||||
|
LVM08010H3H3-M17 |
CABLE-RZD*M*263 |
|||||
|
LVM08010H3G3-M17(抱閘) |
||||||









-02.png)




