
|
驅動器型號 |
L7-100 |
|
|
額定輸出功率 |
100W |
|
|
額定輸出電流(Arms) |
2 |
|
|
最大輸出電流(Arms) |
4.8 |
|
|
主回路與控制回路電源 |
單相220VAC -15%~+10% |
|
|
冷卻方式 |
自然冷卻 |
|
|
尺寸H*L*W(mm) |
175*156*40 |
|
|
接口 |
||
|
調試口 |
mini USB,支持僅USB供電更改參數和導出參數 |
|
|
脈沖輸入 |
5V差分信號,0~500kHz 24V單端信號,0~200kHz |
|
|
分頻輸出 |
支持A相/B相/Z相差分分頻輸出 支持OCA/OCB/OCZ集電極開路分頻輸出 |
|
|
數字量輸入 |
9點(支持共陰和共陽)DI1~DI9 |
|
|
數字量輸出 |
6點(4點單端輸出DO1~DO4,2點雙端輸出DO5~DO6) |
|
|
通訊方式 |
僅支持脈沖輸入 |
|
|
控制模式 |
||
|
控制模式 |
● 外部脈沖位置控制 ● 內部單軸控制(PR) ● JOG控制 |
|
|
位置控制 |
最大輸入脈沖頻率 |
●500kHz(5V差分) ●200kHz(24V單端) |
|
電子齒輪比 (分子/分母) |
1~8388608/1~8388608 |
|
|
轉矩限制 |
參數設置 |
|
|
控制特性 |
||
|
控制方式 |
IGBT SVPWM正弦波控制 |
|
|
反饋方式 |
總線式編碼器:RS485協議 |
|
|
歸一化伺服參數調整 |
PC調試工具,使用剛性等參數,可快速實現伺服參數調整 |
|
|
陷波濾波器 |
抑制機械共振,支持三組陷波器。 |
|
|
擺振抑制 |
抑制末端振動 |
|
|
DI/DO設置 |
可自由分配數字量輸入/輸出 |
|
|
報警功能 |
過壓、欠壓、過流、過載、過熱、過速、主電源輸入缺相、再生制動狀態異常、位置偏差過大、編碼器反饋錯誤、制動率過大、行程超限、EEPROM 錯誤等 |
|
|
操作與顯示 |
按鍵5個,LED 5位帶點 |
|
|
調試軟件 |
通過MS調試軟件可以調節電流環、位置環、速度環的各個參數,更改輸入輸出信號有效電平和電機參數,并可以文件形式進行參數的導入導出,方便驅動器和不同電機或不同負載的匹配;監視在梯形波測試運行下速度、位置誤差等波形。 |
|
|
通訊功能 |
支持USB:基于Modbus協議(依據USB2.0規格),可連接電腦進行參數設定和狀態監控 |
|
|
L7RS支持RS485總線通訊方式(RJ45接口),基于Modbus |
||
|
再生電阻 |
無內置再生電阻 |
|
|
動態制動 |
內置動態制動器,有特殊派生型號去掉動態制動 |
|
|
適用負載慣量 |
小于電機慣量的30倍 |
|
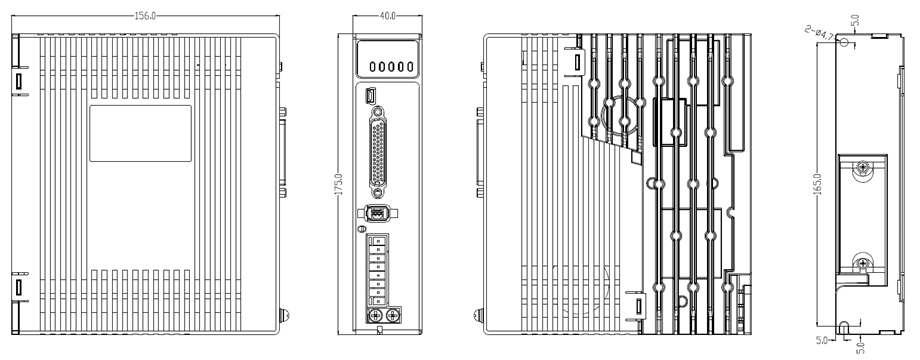
(單位:mm)
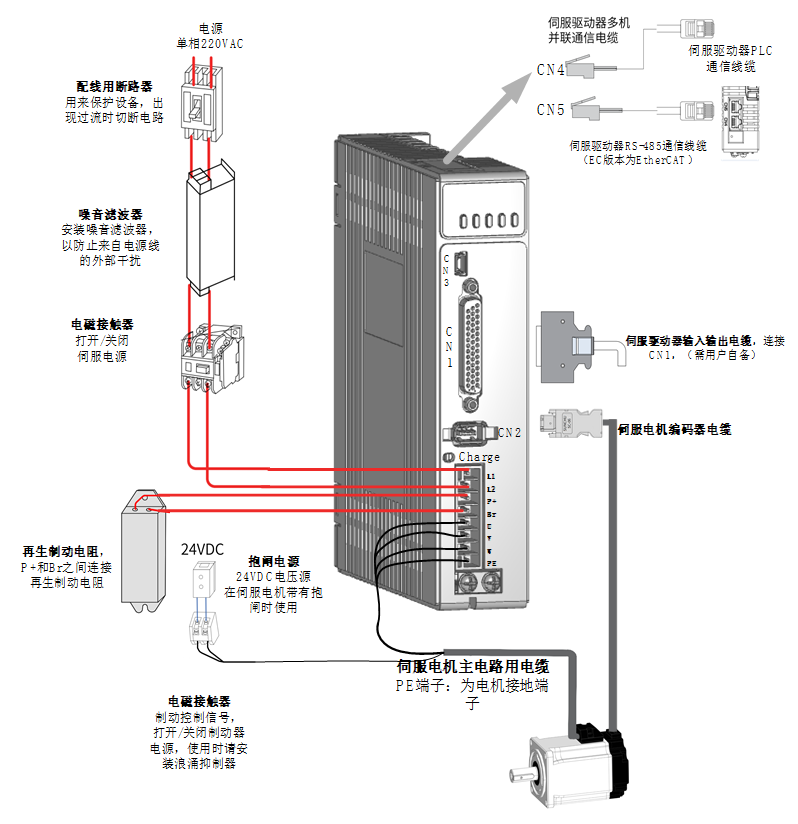
■ 驅動器接口說明
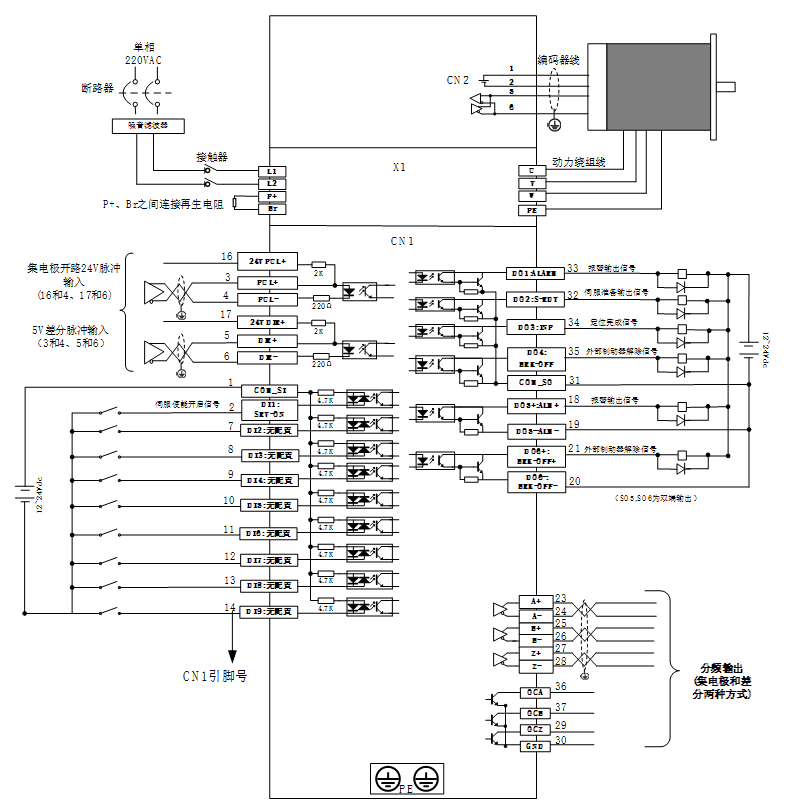
■ 驅動器接線圖

■ 100W電機
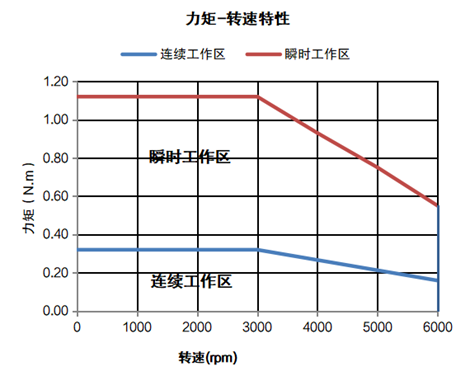
ACM2-04001L2*
ACM1-04001H2*
|
項目 |
L7脈沖系列驅動器 |
|
使用環境溫度 |
0~+55℃(溫度降低,濕度上升時,容易發生結露) |
|
使用環境濕度 |
90%RH以下(不結露) |
|
儲存溫度 |
-20~80℃ (不凍結) |
|
儲存濕度 |
90%RH以下(不結露) |
|
大氣環境 |
室內(無暴曬)無腐蝕性氣體、易燃氣體、油污或塵埃等。 |
|
標高 |
海拔1000m以下 |
|
振動 |
小于0.5G(4.9m/s2)10-60Hz(非連續運行) |
|
防護等級 |
IP20 |














