驅動器概述
|
項目 |
描述 |
||||
|
CANopen規格 |
鏈路層協議 |
CAN總線 |
|||
|
應用層協議 |
CANopen協議 |
||||
|
CAN-ID類型 |
CAN2.0A |
||||
|
波特率 |
1Mbit/s、500Kbit/s、250Kbit/s、125Kbit/s、100Kbit/s、50Kbit/s、20Kbit/s |
||||
|
支持子協議 |
DS 301 V4.02:CANopen應用層和通訊層協議 DSP 402 V2.0:驅動和運動控制子協議 |
||||
|
CANopen有效數據長度 |
0~8字節 |
||||
|
支持服務 |
NMT:網絡管理服務 SDO:服務數據對象 PDO:過程數據對象 設備監視:包括節點保護和心跳報文 SYNC:包括同步發生器及同步接收,應用于PDO傳輸 EMCY:緊急對象服務 |
||||
|
PDO傳輸類型 |
時間觸發、事件觸發、同步觸發 |
||||
|
支持PDO數目 |
3個TPDO,3個RPDO |
||||
|
控制模式 |
PP(Profile Position)協議位置模式 PV(Profile Velocity)協議速度模式 HM(Homing)回原點模式 |
||||
|
主要端口配置 |
工作電壓 |
H2X-CAN506 |
24~50Vdc |
||
|
總線地址設定 |
數碼面板按鍵設定 |
||||
|
顯示及操作 |
按鍵5個,LED 6位 |
||||
|
數字輸入接口 |
H2X-CAN506 |
DI點數:8點 可自由配置成正向限位、反向限位、回零、急停、清除等功能 |
|||
|
數字輸出接口 |
H2X-CAN506 |
DO點數:4點 可自由配置成抱閘輸出、報警輸出、到位輸出等功能 |
|||
|
保護功能 |
過壓、欠壓、過流、位置超差、編碼器斷線報警等 |
||||
|
編碼器脈沖輸出 |
H2X-CAN506 |
A相、B相、Z相:差分輸出 分頻比:1:1倍 |
|||
1.電器指標
|
參數 |
H2X-CAN506 |
|||
|
最小值 |
典型值 |
最大值 |
單位 |
|
|
連續輸出電流 |
0 |
- |
6 |
A |
|
輸入電源電壓 |
24 |
36 |
48 |
DC |
|
邏輯輸入電流 |
7 |
10 |
15 |
mA |
|
絕緣電阻 |
100 |
- |
- |
MΩ |
|
報警輸出邏輯電流 |
- |
- |
100 |
mA |
二、接口定義:
1)電機和電源輸入端口
|
管腳號 |
信號 |
名稱 |
|
1 |
+Vdc |
輸入直流電源 |
|
2 |
GND |
輸入電源地 |
|
3 |
A+ |
A相電機繞組+ |
|
4 |
A- |
A相電機繞組- |
|
5 |
B+ |
B相電機繞組+ |
|
6 |
B- |
B相電機繞組- |
|
7 |
PE |
大地,接機殼 |
2)控制信號端口
|
管腳號 |
信號 |
輸入/輸出 |
名稱 |
|
|
1 |
COM+ |
輸入 |
外部輸入控制信號公共電源正端,12VDC~24VDC。 |
|
|
2 |
SI1 |
輸入 |
數字輸入信號1,共COM+,默認低電平有效,電壓范圍同COM+。 |
|
|
3 |
SI8+ |
輸入 |
數字輸入信號8,高速輸入,差分方式,默認高電平有效,電壓范圍5VDC~24VDC。1MHz |
|
|
4 |
SI8- |
輸入 |
||
|
5 |
SI6 |
輸入 |
數字輸入信號6,共COM+,默認低電平有效,電壓范圍同COM+。 |
|
|
6 |
SI7 |
輸入 |
數字輸入信號7,共COM+,默認低電平有效,電壓范圍同COM+。 |
|
|
7 |
SI2 |
輸入 |
數字輸入信號2,共COM+,默認低電平有效,電壓范圍同COM+。 |
|
|
8 |
SI3 |
輸入 |
數字輸入信號3,共COM+,默認低電平有效,電壓范圍同COM+。 |
|
|
9 |
SI4 |
輸入 |
數字輸入信號4,共COM+,默認低電平有效,電壓范圍同COM+。 |
|
|
10 |
SI5 |
輸入 |
數字輸入信號5,共COM+,默認低電平有效,電壓范圍同COM+。 |
|
|
11 |
NC |
|
|
|
|
12 |
NC |
|
||
|
13 |
SO1 |
輸出 |
數字輸出信號1,共COM- |
OC方式,最大上拉24VDC,50mA,推薦12VDC ~ 24VDC上拉,10mA |
|
14 |
SO2 |
輸出 |
數字輸出信號2,共COM- |
|
|
15 |
SO3 |
輸出 |
數字輸出信號3,共COM- |
|
|
16 |
SO4 |
輸出 |
數字輸出信號4,共COM- |
|
|
17 |
NC |
|
保留 |
|
|
18 |
COM- |
輸入 |
控制信號電源負輸入端 |
|
|
19 |
+5V |
輸出 |
電源5V輸出,50mA |
|
|
20 |
A+ |
輸出 |
編碼器輸出A信號正端 |
|
|
21 |
A- |
輸出 |
編碼器輸出A信號負端 |
|
|
22 |
B+ |
輸出 |
編碼器輸出B信號正端 |
|
|
23 |
B- |
輸出 |
編碼器輸出B信號負端 |
|
|
24 |
Z+ |
輸出 |
編碼器輸出Z信號正端 |
|
|
25 |
Z- |
輸出 |
編碼器輸出Z信號正端 |
|
|
26 |
GND |
輸出 |
電源地 |
|
3)編碼器輸入端口
|
管腳號 |
信號 |
名稱 |
|
1 |
EA+ |
編碼器A通道正輸入 |
|
2 |
EB+ |
編碼器B通道正輸入 |
|
3 |
GND |
編碼器GND輸入 |
|
4 |
NC |
|
|
5 |
NC |
|
|
6 |
NC |
|
|
7 |
EZ+ |
編碼器Z通道正輸入 |
|
8 |
EZ- |
編碼器Z通道負輸入 |
|
9 |
NC |
|
|
10 |
NC |
|
|
11 |
EA- |
編碼器A通道負輸入 |
|
12 |
EB- |
編碼器B通道負輸入 |
|
13 |
VCC |
編碼器+5V電源輸入 |
|
14 |
NC |
|
|
15 |
NC |
|
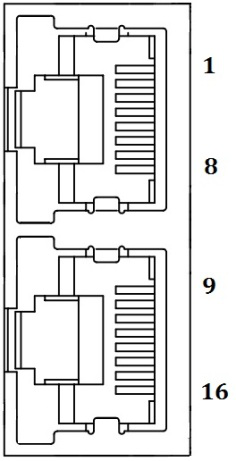
4)CAN通訊端子
|
端子號 |
圖示 |
管腳號 |
信號 |
名稱 |
||||||||||||||||
|
CN5 |
|
1,9 |
CAN_H |
CAN數據正端 |
||||||||||||||||
|
2,10 |
CAN_L |
CAN數據負端 |
||||||||||||||||||
|
3,11 |
CAN_GND |
CAN電源地(隔離) |
||||||||||||||||||
|
4,12 |
/ |
/ |
||||||||||||||||||
|
5,13 |
/ |
/ |
||||||||||||||||||
|
6,14 |
/ |
/ |
||||||||||||||||||
|
7,15 |
CAN_GND |
CAN電源地(隔離) |
||||||||||||||||||
|
8,16 |
/ |
/ |
||||||||||||||||||
|
連接器外殼 |
PE |
屏蔽接地 |
||||||||||||||||||
|
備注 |
① 總線采用隔離方式 ② 最大通信距離與通信速率之間的關系如下:
|
|||||||||||||||||||
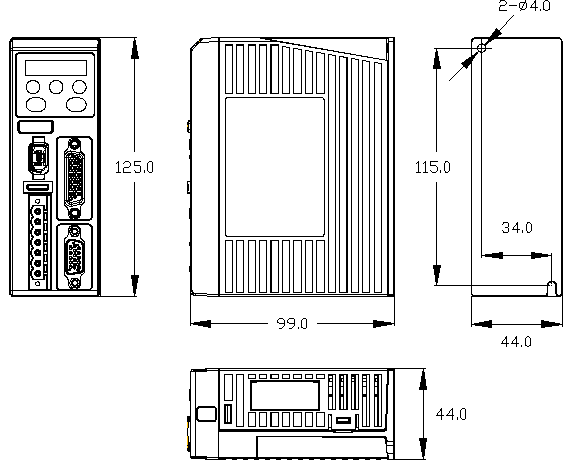
三、使用環境及參數
|
冷卻方式 |
自然冷卻或外加散熱器 |
|
|
使用環境 |
使用場合 |
盡量避免粉塵、油霧及腐蝕性氣體 |
|
溫度 |
0℃-40℃ |
|
|
濕度 |
40-90%RH |
|
|
震動 |
10~55Hz/0.15mm |
|
|
保存溫度 |
-20℃-65℃ |
|
|
重量 |
約280克 |
|
|
機座號 |
混合伺服電機型號 |
保持轉矩 |
機身長 |
|||
|
標準型(IP65) |
高性能型(IP65) |
抱閘型(IP65) |
防水型(IP67) |
|||
|
20機座 |
20HSM003-E1 |
|
|
|
0.03 |
53 |
|
28機座 |
28HSM006-E1 |
28HSM006-E2Z |
|
|
0.06 |
68 |
|
42機座
|
42HSM06-E1 |
42HSM06-E2Z |
42HSM06-BZ-E1/E2Z |
|
0.6 |
79 |
|
42HSM08-E1 |
42HSM08-E2Z |
42HSM08-BZ-E1/E2Z |
|
0.8 |
95 |
|
|
57機座
|
57HSM08-E1 |
57HSM08-E5Z |
|
|
0.8 |
59 |
|
57HSM14-E1 |
57HSM14-E5Z |
57HSM14-BZ-E1 |
57HSM14-FS-E1 |
1.4 |
73 |
|
|
57HSM24-E1 |
57HSM24-E5Z |
57HSM24-BZ-E1 |
57HSM24-FS-E1 |
2.4 |
93 |
|
|
57HSM27-E1 |
57HSM27-E5Z |
|
|
2.7 |
101 |
|
|
60機座
|
60HSM22-E1 |
60HSM22-E5Z |
60HSM22-BZ-E1 |
60HSM22-FS-E1 |
2.2 |
85 |
|
60HSM30-E1 |
60HSM30-E5Z |
60HSM30-BZ-E1 |
60HSM30-FS-E1 |
3 |
103 |
|
適合各種中小型自動化設備和儀器,例如:雕刻機、剝線機、切割機、激光機、繪圖儀、數控機床、自動裝配設備、電子加工設備、紡織服裝設備等。在用戶期望低噪聲、高速度的設備中應用效果特佳。